Восстановление расфокусированных и смазанных изображений
Владимир Южиков
Обработка изображенийАлгоритмыВосстановление искаженных изображений является одной из наиболее интересных и важных проблем в задачах обработки изображений – как с теоретической, так и с практической точек зрения. Частными случаями являются размытие из-за неправильного фокуса и смаз – эти дефекты, с которым каждый из вас хорошо знаком, очень сложны в исправлении – именно они и выбраны темой статьи. С остальными искажениями (шум, неправильная экспозиция, дисторсия) человечество научилось эффективно бороться, соответствующие инструменты есть в каждом уважающем себя фоторедакторе.
Почему же для устранения смаза и расфокусировки практически ничего нету (unsharp mask не в счет) – может быть это в принципе невозможно? На самом деле возможно – соответствующий математический аппарат начал разрабатываться примерно 70 лет назад, но, как и для многих других алгоритмов обработки изображений, все это нашло широкое применение только в недавнее время. Вот, в качестве демонстрации вау-эффекта, пара картинок:
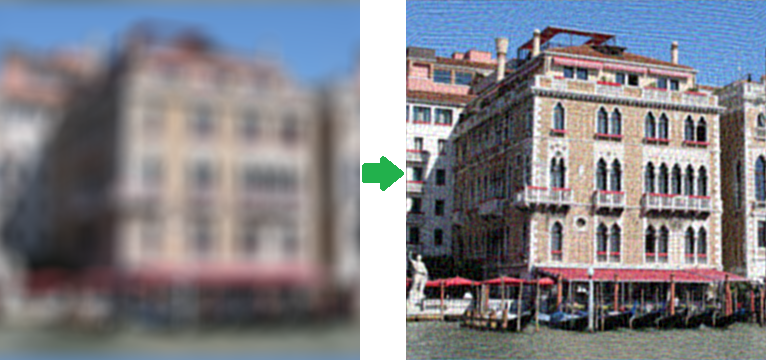
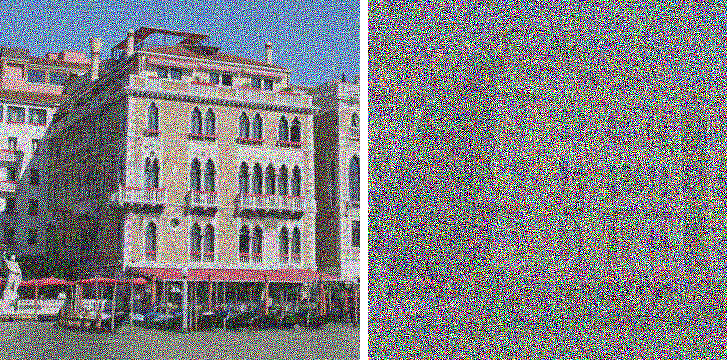
Я не стал использовать замученную
Лену, а нашел свою фотку Венеции. Правое изображение честно получено из левого, причем без использования ухищрений типа 48-битного формата (в этом случае будет 100% восстановление исходного изображения) – слева самый обычный PNG, размытый искусственно. Результат впечатляет… но на практике не все так просто. Под катом подробный обзор теории и практические результаты.
Осторожно, много картинок в формате PNG!
Введение
Начнем издалека. Многие считают, что размытие необратимая операция и информация безвозвратно теряется, т.к. каждый пиксель превращается в пятно, все смешивается, а при большом радиусе размытия так и вовсе получим однородный цвет по всему изображению. Это не совсем так – вся информация просто перераспределяется по некоторому закону и может быть однозначно восстановлена с некоторыми оговорками. Исключение составляет лишь края изображения шириной в радиус размытия – там полноценное восстановление невозможно.
Продемонстрируем это «на пальцах», используя небольшой пример для одномерного случая – представим что у нас есть ряд из пикселей со значениями:
x
1 | x
2 | x
3 | x
4… – Исходное изображение
После искажения значение каждого пикселя суммируется со значением левого, т.е. x’
i = x
i + x
i-1. По идее, надо еще поделить на 2, но опустим это для простоты. В результате имеем размытое изображения со значениями пикселей:
x
1 + x
0 | x
2 + x
1 | x
3 + x
2 | x
4 + x
3… – Размытое изображение
Теперь будем пробовать восстанавливать, вычтем последовательно по цепочке значения по схеме – из второго пиксела первый, из третьего результат второго, из четвертого результат третьего и так далее, получим:
x
1 + x
0 | x
2 — x
0 | x
3 + x
0 | x
4 — x
0… – Восстановленное изображение
В итоге вместо размытого изображения получили исходное изображение, к пикселям которого добавлена неизвестная константа x
0 с чередующимся знаком. Это уже намного лучше – эту константу можно подобрать визуально, можно предположить, что она примерно равна значению x
1, можно автоматически подобрать с таким критерием, чтобы значения соседних пикселей «скакали» как можно меньше и т.д. Но все меняется, как только мы добавляем шум (которые всегда есть в реальных изображениях). При описанной схеме на каждом шаге будет накапливаться вклад шума в общую составляющую, что в итоге может дать совершенно неприемлемый результат, но, как мы убедились, восстановление вполне реально даже таким примитивным способом.
Модель процесса искажения
А теперь перейдем к более формальному и научному описанию этих процессов искажения и восстановления. Будем рассматривать только полутоновые черно-белые изображения в предположении, что для обработки полноцветного изображения достаточно повторить все необходимые шаги для каждого из цветовых каналов RGB. Введем следующие обозначения:
f(x, y) – исходное неискаженное изображение
h(x, y) – искажающая функция
n(x, y) – аддитивный шум
g(x, y) – результат искажения, т.е. то, что мы наблюдаем в результате (смазанное или расфокусированное изображение)
Сформулируем модель процесса искажения следующим образом:
g(x, y) = h(x, y) * f(x, y) + n(x, y) (1)
Задача восстановления искаженного изображения заключается в нахождении наилучшего приближения
f'(x, y) исходного изображения. Рассмотрим каждую составляющую более подробно. С
f(x, y) и
g(x, y) все достаточно понятно. А вот про функцию
h(x, y) нужно сказать пару слов – что же она из себя представляет? В процессе искажения каждый пиксель исходного изображения превращается в пятно для случая расфокусировки и в отрезок для случая простого смаза. Либо же можно сказать наоборот, что каждый пиксель искаженного изображения «собирается» из пикселей некоторой окрестности исходного изображения. Все это друг на друга накладывается и в результате мы получаем искаженное изображение. То, по какому закону размазывается или собирается один пиксель и называется функцией искажения. Другие синонимы – PSF (Point spread function, т.е. функция распределения точки), ядро искажающего оператора, kernel и другие. Размерность этой функции, как правило меньше размерности самого изображения – к примеру, в начальном рассмотрении примера «на пальцах» размерность функции была 2, т.к. каждый пиксель складывался из двух.
Искажающие функции
Посмотрим как выглядят типичные искажающие функции. Здесь и далее будем использовать ставший уже стандартным для таких целей инструмент – Matlab, он содержит в себе все необходимое для самых разнообразных экспериментов с обработкой изображений (и не только) и позволяет сосредоточиться на самих алгоритмах, перекладывая всю рутинную работу на библиотеки функций. Впрочем, за это приходится расплачиваться производительностью. Итак, вернемся к PSF, вот примеры их вида:
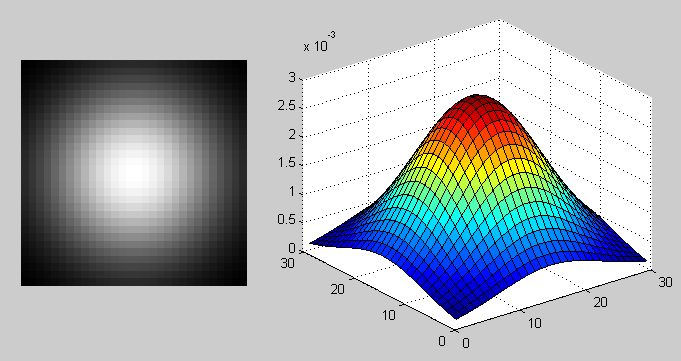 PSF в случае размытия по Гауссу функцией fspecial('gaussian', 30, 8);
PSF в случае размытия по Гауссу функцией fspecial('gaussian', 30, 8);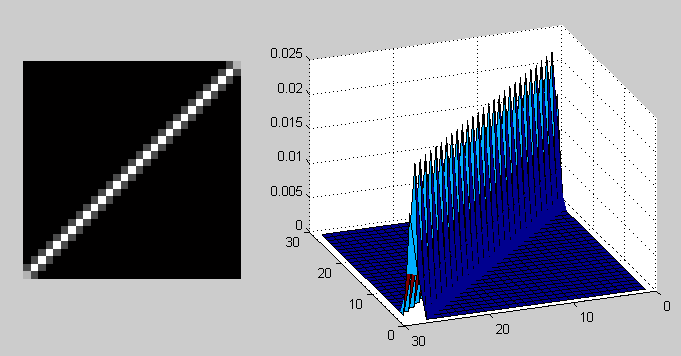 PSF в случае смаза фунцией fspecial('motion', 40, 45);
PSF в случае смаза фунцией fspecial('motion', 40, 45);Операция применения искажающей функции к другой функции (к изображению, в данном случае) называется сверткой (convolution), т.е. некоторая область исходного изображения сворачивается в один пиксель искаженного изображения. Обозначается через оператор «*», не путать с обычным умножением! Математически для изображения
f с размерами M x N и искажающей функции
h c размерами m x n это записывается так:

(2)
Где
a = (m — 1) / 2, b = (n – 1) / 2. Операция, обратная свертке, называется деконволюцией (deconvolution) и решение такой задачи весьма нетривиально.
Модель шума
Осталось рассмотреть последнее слагаемое, отвечающее за шум,
n(x, y) в формуле (1). Причины шума в цифровых сенсорах могут быть самыми разными, но основные это – тепловые колебания и темновые токи. На величину шума также влияет ряд факторов, таких как значение ISO, тип ма
трицы, размер пикселя, температура, электромагнитные наводки и пр. В большинстве случаев шум является Гауссовым (который задается двумя параметрами – средним и дисперсией), а также является аддитивным, не коррелирует с изображением и не зависит координат пикселя. Последние три предположения являются очень важными для дальнейшей работы.
Теорема о свертке
Вернемся теперь к первоначальной постановке задачи восстановления – нам необходимо каким-то образом обратить свертку, при этом не забывая про шум. Из формулы (2) видно, что получить
f(x, y) из
g(x, y) не так-то просто – если решать, что называется, «в лоб», то получится огромная система уравнений. Но на помощь к нам приходит
преобразование Фурье, не будем подробно на нем останавливаться, по этой теме уже было сказано немало. Так вот, есть такая теорема о свертке, которая гласит, что операция свертки в пространственной области эквивалентна обычному умножению в частотной области (причем умножение поэлементное, а не матричное). Соответственно, операция обратная свертке эквивалентна делению в частотной области, т.е это можно записать как:

(3)
Где
H(u, v), F(u, v) – Фурье-образы соответствующих функций. Значит процесс искажения из формулы (1) можно переписать в частотной области как:

(4)
Инверсная фильтрация
Тут же напрашивается поделить это равенство на
H(u, v) и получить следующую оценку
F^(u, v) исходного изображения:
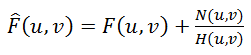
(5)
Это называется инверсной фильтрацией, но на практике практически никогда не работает. Почему же? Чтобы ответить на этот вопрос посмотрим на последнее слагаемое в формуле (5) – если функция
H(u, v) принимает значение близкие к нулю или нулевые, то вклад этого слагаемого будет доминирующим. Это практически всегда встречается в реальных примерах – для объяснения этого вспомним как выглядит спектр после преобразование Фурье.
Берем исходное изображение,

преобразуем его в полутоновое и, используя Matlab, получаем спектр:
% Load image
I = imread('image_src.png');
figure(1); imshow(I); title('Исходное изображение');
% Convert image into grayscale
I = rgb2gray(I);
% Compute Fourier Transform and center it
fftRes = fftshift(fft2(I));
% Show result
figure(2); imshow(mat2gray(log(1+abs(fftRes)))); title('FFT - Амплитудный спектр (логарифмическая шкала)');
figure(3); imshow(mat2gray(angle(fftRes))); title('FFT - Фазовый спектр');
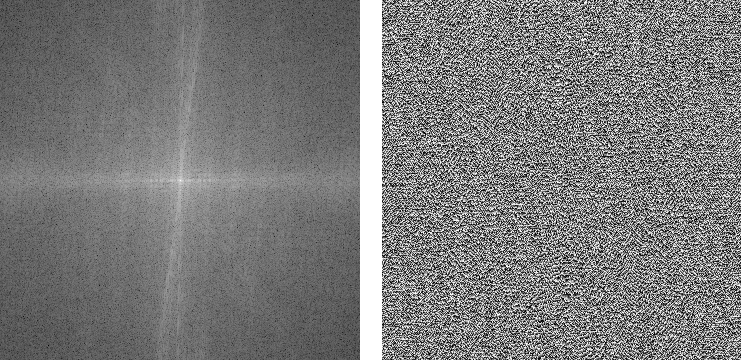
В результате получаем две компоненты: амплитудный и фазовый спектры. Про фазу, кстати, многие забывают. Обратите внимание, что амплитудный спектр показан в логарифмической шкале, т.к. его значения варьируются очень сильно – на несколько порядков, в центре максимальные значения (порядка миллионов) и быстро убывают практически до нулевых по мере удаления от центра. Именно из-за этого инверсная фильтрация будет работать только при нулевых или практически нулевых значениях шума. Продемонстрируем это на практике с помощью следующего скрипта:
% Load image
I = im2double(imread('image_src.png'));
figure(1); imshow(I); title('Исходное изображение');
% Blur image
Blurred = imfilter(I, PSF,'circular','conv' );
figure(2); imshow(Blurred); title('Размытое изображение');
% Add noise
noise_mean = 0;
noise_var = 0.0;
Blurred = imnoise(Blurred, 'gaussian', noise_mean, noise_var);
% Deconvolution
figure(3); imshow(deconvwnr(Blurred, PSF, 0)); title('Результат');
noise_var = 0.0000001 noise_var = 0.000005
Хорошо видно, что добавление даже очень небольшого шума приводит к значительным помехам, что сильно ограничивает практическое применение метода.
Существующие подходы для деконволюции
Но есть подходы, которые учитывают учитывают наличие шума на изображении – один из самых известных и самых первых, это фильтр Винера (Wiener). Он рассматривает изображение и шум как случайные процессы и находит такую оценку
f' для неискаженного изображения
f, чтобы среднеквадратическое отклонение этих величин было минимальным. Минимум этого отклонения достигается на функции в частотной области:

(6)
Этот результат был получине Винером в 1942 году. Подробный вывод здесь приводить не будем, те, кто интересуется, могут посмотреть его
здесь . Функцией S здесь обозначаются энергетические спектры шума и исходного изображения соответственно – поскольку, эти величины редко бывают известны, то дробь S
n / S
f заменяют на некоторую константу K, которую можно приблизительно охарактеризовать как соотношение сигнал-шум.
Следующий метод, это «сглаживающая фильтрация методом наименьших квадратов со связью», другие названия: «фильтрация по Тихонову», «Тихоновская регуляризация». Его идея заключается в формулировке задачи в матричном виде с дальнейшем решением соответствующей задачи оптимизации. Это решение записывается в виде:

(7)
Где
y – параметр регуляризации, а
P(u, v) – Фурье-преобразование оператора Лапласа (матрицы 3 * 3).
Еще один интересный подход предложили независимо Ричардосн [Richardson, 1972] и Люси [Lucy, 1974]. Метод так и называется «метод Люси-Ричардсона». Его отличительная особенность в том, что он является нелинейным, в отличие от первых трех – что потенциально может дать лучший результат. Вторая особенность – метод является итерационным, соответственно возникают трудности с критерием останова итераций. Основная идея состоит в использовании метода максимального правдоподобия для которого предполагается, что изображение подчиняется распределению Пуассона. Формулы для вычисления достаточно простые, без использования преобразования Фурье – все делается в пространственной области:

(8)
Здесь символом «*», как и раньше, обозначается операция свертки. Этот метод широко используется в программах для обработки астрономических фотографий – в них использование деконволюции (вместо unsharp mask, как в фоторедакторах) является стандартом де-факто. В качестве примера можно привести Astra Image, вот
примеры деконволюции. Вычислительная сложность метода очень большая – обработка средней фотографии, в зависимости от количества итераций, может знанимать многие часы и даже дни.
Последний рассматриваемый метод, а вернее, целое семейство методов, которые сейчас активно разрабатываются и развиваются – это слепая деконволюция (blind deconvolution). Во всех предыдущих методах предполагалось, что искажающая функция PSF точно известна, в реальности это не так, обычно PSF известна лишь приблизительно по характеру видимых искажений. Слепая деконволюция как раз является попыткой учитывать это. Принцип достаточно простой, если не углубляться в детали – выбирается первое приближение PSF, далее по одному из методов делается деконволюция, после чего некоторым критерием определяется степень качества, на осн
ове нее уточняется функция PSF и итерация повторяется до достижения нужного результата.
Практика
Теперь с теорией все – перейдем к практике, начнем со сравнения перечисленных методов на изображении с искусственным размытием и шумом.

% Load image
I = im2double(imread('image_src.png'));
figure(1); imshow(I); title('Исходное изображение');
% Blur image
PSF = fspecial('disk', 15);
Blurred = imfilter(I, PSF,'circular','conv' );
% Add noise
noise_mean = 0;
noise_var = 0.00001;
Blurred = imnoise(Blurred, 'gaussian', noise_mean, noise_var);
figure(2); imshow(Blurred); title('Размытое изображение');
estimated_nsr = noise_var / var(Blurred(:));
% Restore image
figure(3), imshow(deconvwnr(Blurred, PSF, estimated_nsr)), title('Wiener');
figure(4); imshow(deconvreg(Blurred, PSF)); title('Regul');
figure(5); imshow(deconvblind(Blurred, PSF, 100)); title('Blind');
figure(6); imshow(deconvlucy(Blurred, PSF, 100)); title('Lucy');
Результаты:
 Фильтр Винера
Фильтр Винера Регуляризация по Тихонову
Регуляризация по Тихонову Фильтр Люси-Ричардсона
Фильтр Люси-Ричардсона Слепая деконволюция
Слепая деконволюцияЗаключение
И в конце первой части немного затронем примеры реальных изображений. До этого все искажения были искусственными, что конечно хорошо для обкатки и изучения, но очень интересно посмотреть, как все это будет работать с настоящими фотографиями. Вот один пример такого изображения, снятого зеркалкой Canon 500D с ручным уводом фокуса:

Далее запускаем несложный скрипт:
% Load image
I = im2double(imread('IMG_REAL.PNG'));
figure(1); imshow(I); title('Исходное изображение');
%PSF
PSF = fspecial('disk', 8);
noise_mean = 0;
noise_var = 0.0001;
estimated_nsr = noise_var / var(I(:));
I = edgetaper(I, PSF);
figure(2); imshow(deconvwnr(I, PSF, estimated_nsr)); title('Результат');
И получаем следующий результат:

Как видно, на изображении появились новые детали, четкость стала гораздо выше, правда появились и помехи в виде «звона» на контрастных границах.
И пример с реальным смазом — для его осуществления фотоаппарат был установлен на штатив, выставлена относительно длинная выдержка и равномерным движением в момент срабатывания затвора был получен смаз:

Скрипт примерно тот же, только тип PSF теперь «motion»:
% Load image
I = im2double(imread('IMG_REAL_motion_blur.PNG'));
figure(1); imshow(I); title('Исходное изображение');
%PSF
PSF = fspecial('motion', 14, 0);
noise_mean = 0;
noise_var = 0.0001;
estimated_nsr = noise_var / var(I(:));
I = edgetaper(I, PSF);
figure(2); imshow(deconvwnr(I, PSF, estimated_nsr)); title('Результат');
Результат:

Качество, опять же, заметно улучшилось — стали различимы рамы на окнах, машины. Артефакты уже другие, нежели в предыдушем примере с расфокусировкой.
На этом интересном и закончим первую часть.
Во второй части я сосредоточусь на проблемах обработки реальных изображений — построения PSF и их оценки, рассмотрю более сложные и продвинутые техники деконволюции, методы устранения дефектов типа звона, проведу обзор и сравнения существующего ПО и прочее.
P.S. Не так давно была опубликована статья на хабре про
Исправление смазанных фотографий в новой версии PhotoshopДля тех, кто хочет поиграться с похожей технологией устранения смаза (возможно, той самой, что будет использоваться в фотошопе), можно по
этой ссылке скачать демо-версию приложения, посмотреть примеры восстановления, а также
почитать про принцип работы.
Литература
Гонсалес Р., Вудс Р. Цифровая обработка изображений
Гонсалес Р., Вудс Р., Эддинс С. Цифровая обработка изображений в среде MATLAB
Восстановление расфокусированных и смазанных изображений. Практика
Не так давно я опубликовал на хабре
первую часть статьи по восстановлению расфокусированных и смазанных изображений, где описывалась теоретическая часть. Эта тема, судя по комментариям, вызвала немало интереса и я решил продолжить это направление и показать вам какие же проблемы появляются при практической реализации казалось бы простых формул.
В дополнение к этому я написал демонстрационную программу, в которой реализованы основные алгоритмы по устранению расфокусировки и смаза. Программа выложена на GitHub вместе с исходниками и дистрибутивами.
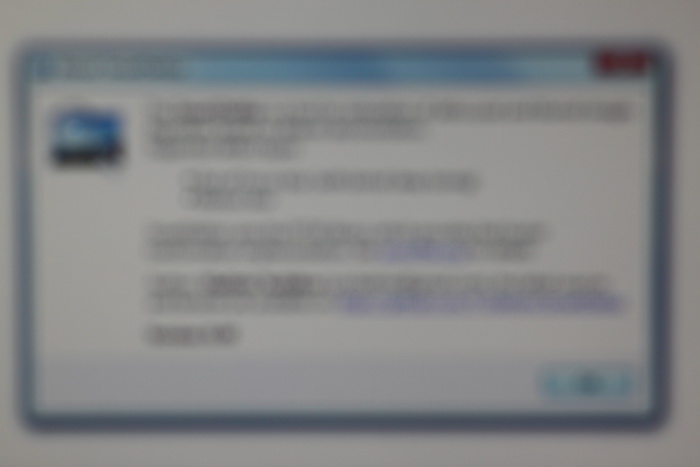
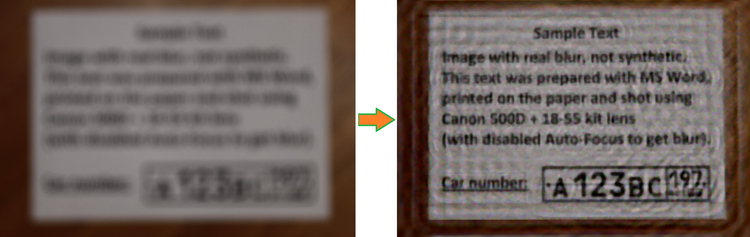
Ниже показан результат обработки реального размытого изображения (не с синтетическим размытием). Исходное изображение было получено камерой Canon 500D с объективом EF 85mm/1.8. Фокусировка была выставлена вручную, чтобы получить размытие. Как видно, текст совершенно не читается, лишь угадывается диалоговое окно Windows 7.
И вот результат обработки:
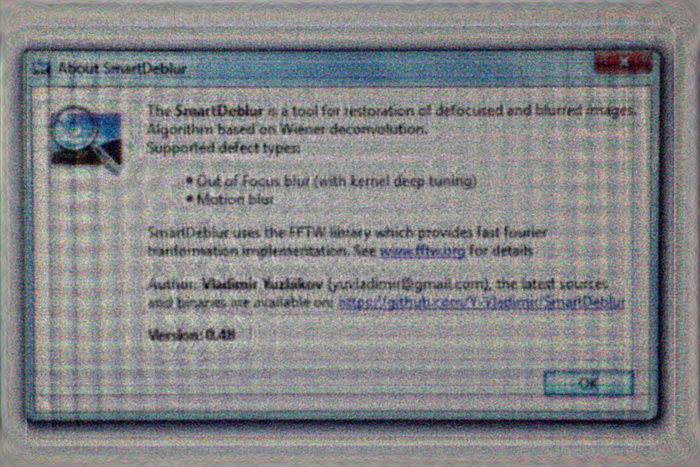
Практически весь текст читается достаточно хорошо, хотя и появились некоторые характерные искажения.
Под катом подробное описание проблем деконволюции, способов их решения, а также множество примеров и сравнений. Осторожно, много картинок!
Вспомним теорию
Подробное описание теории было в первой части, но все же напомню вкратце основные моменты. В процессе искажения из каждого пикселя исходного изображения получается некоторое пятно в случае расфокусировки и отрезок для случая обычного смаза. Все это друг на друга накладывается и в результате мы получаем искаженное изображение — это называется сверткой изображения или конволюцией. То, по какому закону размазывается один пиксель и называется функцией искажения. Другие синонимы – PSF (Point spread function, т.е. функция распределения точки), ядро искажающего оператора, kernel и другие.
Чтобы восстановить исходное изображение нам необходимо каким-то образом обратить свертку, при этом не забывая про шум. Но это не так-то просто – если действовать, что называется, «в лоб», то получится огромная система уравнений, которую решить за приемлемое время невозможно.
Но на помощь к нам приходит преобразование Фурье и теорема о свертке, которая гласит, что операция свертки в пространственной области эквивалентна обычному умножению в частотной области (причем умножение поэлементное, а не матричное). Соответственно, операция обратная свертке эквивалентна делению в частотной области. Поэтому процесс искажения можно переписать следующим образом:
(1),
где все элементы — это фурье-образы соответствующих функций:
G(u,v) – резуль
тат искажения, т.е. то, что мы наблюдаем в результате (смазанное или расфокусированное изображение)
H(u,v) – искажающая функция, PSF
F(u,v) – исходное неискаженное изображение
N(u,v) – аддитивный шум
Итак, нам нужно восстановить максимальное приближение к исходному изображению F(u,v). Просто поделить правую и левую часть на H(u,v) не получится, т.к. при наличии даже совсем небольшого шума (а он всегда есть на реальных изображениях) слагаемое N(u,v)/H(u,v), будет доминировать, что приведет к тому, что исходное изображение будет целиком скрыто под шумом.
Чтобы решить эту проблему, были разработаны более устойчивые методы, одним из которых являтся фильтр Винера (Wiener). Он рассматривает изображение и шум как случайные процессы и находит такую оценку f' для неискаженного изображения f, чтобы среднеквадратическое отклонение этих величин было минимальным:
(2)
Функцией S здесь обозначаются энергетические спектры шума и исходного изображения соответственно – поскольку, эти величины редко бывают известны, то дробь S
n / S
f заменяют на некоторую константу K, которую можно приблизительно охарактеризовать как соотношение сигнал-шум.
Способы получения PSF
Итак, возьмем за отправную точки описанный фильтр Винера — вообще говоря, существует множество других подходов, но все они дают примерно одинаковые результаты. Так что все описанное ниже будет справедливо и для остальных методов деконволюции.
Основная задача — получить оценку функции распределения точки (PSF). Это можно сделать несколькими способами:
1. Моделирование. Очень непросто и трудоемко, т.к. современные объективы состоят из десятка, другого различных линз и оптических элементов, часть из которых имеет асферическую форму, каждый сорт стекла имеет свои уникальные характеристики преломления лучей с той или иной длиной волны. В итоге задача корректного расчета распространение света в такой сложнейшей оптической системе с учетом влияния диафрагмы, переотражений и т.п. становится практически невозможной. И решение ее, пожалуй, доступно только разработчикам современных объективов.
2. Непосредственное наблюдение. Вспомним, что PSF — это то, во что превращается каждая точка изображения. Т.е. если мы сформируем черный фон и одну белую точку на нем, а затем сфотографируем это с нужным значением расфокусировки, то мы получим непосредственно вид PSF. Кажется просто, но есть много нюансов и тонкостей.
3. Вычисление или косвенное наблюдение. Присмотримся к формуле (1) процесса искажение и подумаем, как можно получить H(u,v)? Решение приходит сразу — нужно иметь исходное F(u,v) и искаженное G(u,v) изображения. Тогда поделив фурье-образ искаженного изображения на фурье-образ исходного изображения мы получим искомую PSF.
Про боке
Перед тем как перейдем к деталям, расскажу немного теории расфокусировки применительно к оптике. Идеальный объектив имеет PSF в виде круга, соответственно каждая точка превращается в круг некоторого диаметра. Кстати, это для многих неожиданность, т.к. с первого взгляда кажется, что дефокус просто растушевывает все изображение. Это же объясняет и то, почему фотошоповское размытие Гаусса совсем не похоже на тот рисунок фона (его еще называют боке), который мы видим у объективов. На самом деле это два разных типа размытия — по Гауссу каждая точка превращается в нечеткое пятно (колокол Гаусса), а дефокус каждую точку превращает в круг. Соответственно и разные результаты.
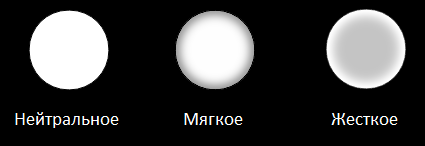
Но идеальных объективов у нас нет и в реальности мы получаем то или иное отклонение от идеального круга. Именно это и формирует неповторимый рисунок боке каждого объектива, заставляя фотографов тратить кучу денег на объективы с красивым боке :) Боке можно условно разделить на три типа:
— Нейтральное. Это максимальное приближение к кругу
— Мягкое. Когда края имеют меньшую яркость, чем центр
— Жесткое. Когда края имеют большую яркость, чем центр.
Рисунок ниже иллюстрирует это:
Более того, тип боке — мягкое или жесткое зависит еще и от того, передний это фокус или задний. Т.е. фотоаппарат сфокусирован перед объектом или же за ним. К примеру, если объектив имеет мягкий рисунок боке в переднем фокусе (когда, скажем, фокус на лице, а задний план размыт), то в заднем фокусе боке того же объектива будет жестким. И наоборот. Только нейтральное боке не меняется от вида фокуса.
Но и это еще не все — поскольку каждому объективу присущи те или иные геометрические искажения, то вид PSF зависит еще и от положения. В центре — близко к кругу, по краям — эллипсы и другие сплюснутые фигуры. Это хорошо видно на следующем фото — обратите внимание на правый нижний угол:

А теперь рассмотрим подробнее два последних метода получения PSF.
PSF — Непосредственное наблюдение
Как уже говорилось выше, необходимо сформировать черный фон и белую точку. Но просто напечатать на принтере одну точку недостаточно. Необходим намного большее отличие в яркости черного фона и белой точки, т.к. одна точка будет размываться по большому кругу — соответственно должна иметь большую яркость, чтобы быть видной после размытия.
Для этого я распечатал черный квадрат Малевича (да, тонера много ушло, но чего не сделаешь ради науки!), наложил с другой стороны фольгу, т.к. лист бумаги все же неплохо просвечивает и иголкой проколол маленькую дырочку. Затем соорудил нехитрую конструкцию из 200-ваттной лампы и сэндвича из черного листа и фольги. Выглядело это вот так:

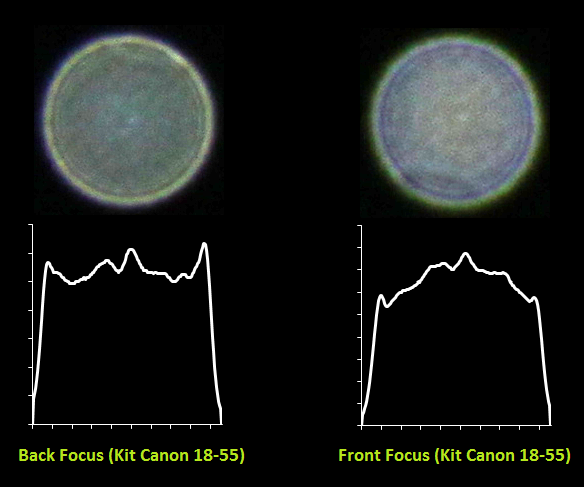
Далее включил лампу, закрыл ее листом, выключил общий свет и сделал несколько фоток используя два объектива — китовый Canon EF 18-55 и портретник Canon EF 85mm/1.8. Из получившихся фоток я вырезал PSF и затем построил графики профилей.
Вот что получилось для китового объектива:
И для портретника Canon EF 85mm/1.8:
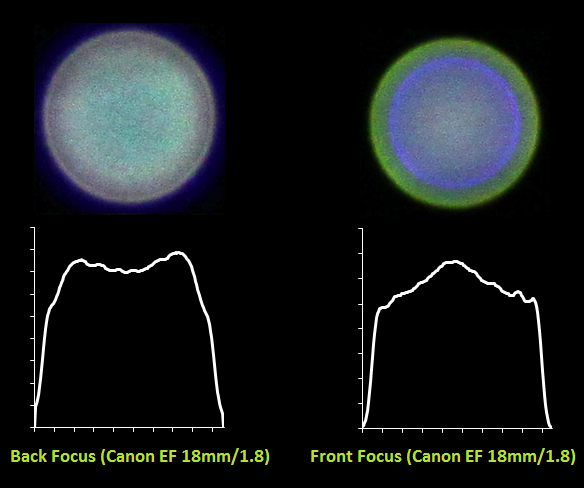
Хорошо видно как меняется характер боке с жествкого на мягкий для одного и того же объектива в случае переднего и заднего фокуса. Также видно, какую непростую форму имеет PSF — она весьма далека от идеального круга. Для портретника также видны большие
хроматические аберрации из-за большой светосилы объектива и малой диафрагмы 1.8.
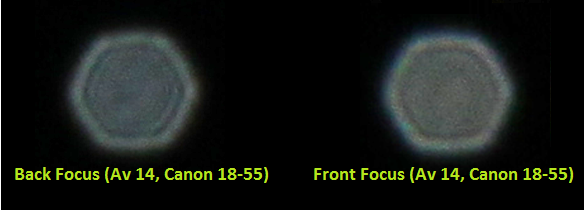
И вот еще пара снимков при диафрагме 14 — на нем видно, как поменялась форма с круга на правильный шестиугольник:
PSF — Вычисление или косвенное наблюдение
Следующий подход — косвенное наблюдение. Для этого, как писалось выше, нам нужно иметь исходное F(u,v) и искаженное G(u,v) изображения. Как их получить? Очень просто — необходимо поставить фотоаппарат на штатив и сделать один резкий и один размытый снимок одного и того изображения. Далее с помощью деления фурье-образа искаженного изображения на фурье-образ исходного изображения мы получим фурье-образ нашей искомой PSF. После чего применив обратное преобразование Фурье получим PSF в прямом виде.
Я сделал два снимка:


И в результате получил во
т такую PSF:
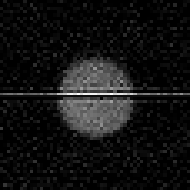
На горизонтальную линию не обращайте внимания, это артефакт после преобразования Фурье в матлабе. Результат, скажем так, средненький — очень много шумов и детали PSF видны не так хорошо. Тем не менее, метод имеет право на существование.
Описанные методы можно и нужно использовать для построения PSF при восстановлении размытых изображений. Т.к. от того, насколько эта функция приближена к реальной напрямую зависит качество восстановления исходного изображения. При несовпадении предполагаемой и реальной PSF будут наблюдаться многочисленные артефакты в виде «звона», ореолов и снижения четкости. В большинстве случаев предполагается форма PSF в виде круга, тем не менее для достижения максимальной степени восстановления рекомендуется поиграться с формой этой функции, попробовав несколько вариантов от распространенных объективов — как мы видели, форма PSF может варьироваться в значительной степени в зависимости от диафрагмы, объектива и прочих условий.
Краевые эффекты
Следующая проблема заключается в том, что если напрямую применить фильтр Винера, то на краях изображения будет своеобразный «звон». Его причина, если объяснять на пальцах, заключается в следующем — когда делается деконволюция для тех точек, которые расположены на краях, то при сборке не хватает пикселей, которые находятся за краями изображения и они принимаются либо равным нулю, либо берутся с противоположной стороны (зависит от реализации фильтра Винера и преобразования Фурье). Выглядит это так:

Одно из решений, чтобы избежать этого состоит предобработке краев изображения. Они размываются с помощью той же самой PSF. На практике это реализуется следующем образом — берется входное изображение F(x,y), размывается с помощью PSF и получается F'(x,y), затем итоговое входное изображение F''(x,y) формируется суммированием F(x,y) и F'(x,y) с использованием весовой функции, которая на краях принимает значение 1 (точка целиком берется из размытого F'(x,y)), а на расстоянии равном (или большем) радиусу PSF от края изображения принимает значение 0. Результат получается такой — звон на краях исчез:

Практическая реализация
Я сделал программу, демонстрирующую восстановление смазанных и расфокусированных изображений. Написана она на C++ с использованием Qt. В качестве реализации преобразования Фурье я выбрал библиотеку
FFTW, как самую быструю из опен-соурсных реализаций. Называется моя программа SmartDeblur, скачать ее можно на странице
github.com/Y-Vladimir/SmartDeblur, все исходники открыты под лицензией GPL v3.
Скриншот главного окна:

Основные функции:
— Высокая скорость. Обработка изображения размером 2048*1500 пикселей занимает около 300мс в режиме Preview (когда перемещаются ползунки настроек) и 1.5 секунды в чистовом режиме (когда отпустили ползунки настроек).
— Подбор параметров в Real-time режиме. Нет необходимости нажимать кнопки Preview, все делается автоматически, нужно лишь двигать ползунки настроек искажения
— Вся обработка идет для изображения в полном разрешении. Т.е. нет никакого маленького окошка предпросмотра и кнопок Apply.
— Поддержка восстановления смазанных и расфокусированных изображений
— Возможность подстройки вида PSF
Основной упор при разработке был сделан на скорость. В итоге она получилась такая, что превосходит коммерческие аналоги в десятки раз. Вся обработка сделана по-взрослому, в отдельном потоке. За 300 мс программа успевает сгенерить новую PSF, сделать 3 преобразования Фурье, сделать деконволюцию по Винеру и отобразить результат — и все это для изображения размером 2048*1500 пикселей. В чистовом режиме делается 12 преобразований Фурье (3 для каждого канала, плюс одно для каждого канала для подавления краевых эффектов) — это занимает около 1.5 секунд. Все времена указаны для процессора Core i7.
Пока в программе есть ряд багов и особенностей — скажем, при некоторых значениях настроек изображение покрывается рябью. Точно причину выяснить не удалось, но предположительно — особенности работы библиотеки FFTW.
Ну и в целом в процессе разработки пришлось обходить множество скрытых проблем как в FFTW (например не поддерживаются изображения с нечетным размером одной из сторон, типа 423*440.). Были проблемы и с Qt — выяснилось, что рендеринг линии со включенным Antialiasing работает не совсем точно. При некоторых значениях углов линия перескакивала на доли пикселя, что давало артефакты в виде сильной ряби. Для обхода этой проблемы добавил строчки:
// Workarround to have high accuracy, otherwise drawLine method has some micro-mistakes in the rendering QPen pen = kernelPainter.pen(); pen.setWidthF(1.01); kernelPainter.setPen(pen);
Сравнение
Осталось сравнить качество обработки с коммерческими аналогами.
Я выбрал 2 самые известные программы
1. Topaz InFocus —
www.topazlabs.com/infocus/2. Focus Magic —
www.focusmagic.com/Для чистоты эксперимента будем брать те рекламные изображения, которые приведены на официальных сайтах — так гарантируется, что параметры тех программ выбраны оптимальными (т.к. думаю, разработчики тщательно отбирали изображения и подбирали параметры перед публикацией в рекламе на сайте).
Итак поехали — восстановление смаза:
Берем пример с сайта Topaz InFocus
www.topazlabs.com/infocus/_images/licenseplate_compare.jpg
Обрабатываем с вот такими параметрами:
и получаем такой результат:

Результат с сайта Topaz InFocus:

Результат весьма схожий, это говорит о том, что в основе Topaz InFocus используется похожий алгоритм деконволюции плюс постобработка в виде заглаживания-удаления шумов и подчеркивания контуров.
Примеров сильно дефокусировки на сайте этой программы найти не удалось, да и она не предназначена для этого (максимальный радиус размытия составляет всего несколько пикселей).
Можно отметить еще один момент — угол наклона оказался ровно 45 градусов, а длина смаза 10 пикселей. Это наводит на мысль о том, что изображение смазано искусственно. В пользу этого факта говорит и то, что качество восстановления очень хорошее.
Пример номер два — восстановление дефокусировки. Для этого возьмем пример с сайта Focus Magic:
www.focusmagic.com/focusing-examples.htm
Получили вот такой результат:
 |  |
| Результат SmartDeblur | Результат Focus Magic |
Тут уже не так очевидно, что лучше.
Заключение
На этом я хотел бы закончить эту статью. Хотя и много чего еще хотелось написать, но и так уже длинн
ый текст получился. Буду очень признателен, если попробуете скачать SmartDeblur и потестировать на реальных изображениях — у меня, к сожалению, не так много расфокусированных и смазанных изображений, все поудалял :)
И буду особо признателен, если пришлете мне (мыло есть в профиле) свой фидбек и примеры удачных/неудачных восстановлений. Ну и просьба сообщать о всех багах, замечаниях, предложениях — т.к. приложение еще пока местами сыроватое и немного нестабильное.
P.S. Исходники пока не очень чистые в плане стиля — там пока куча утечек памяти, еще не успел перевести на смарт-поинтеры, поэтому после нескольких изображений может перестать открывать файлы. Но в целом работает :)
Восстановление расфокусированных и смазанных изображений. Повышаем качество
Представляю вашему вниманию заключительную статью из трилогии «Восстановление расфокусированных и смазанных изображений». Первые две вызвали заметный интерес — область, действительно, интересная. В этой части я рассмотрю семейство методов, которые дают лучшее качество, по сравнении со стандартным Винеровским фильтром — это методы, основанные на Total Variaton prior.
Также по традиции я выложил новую версию SmartDeblur (вместе с исходниками в open-source) в которой реализовал этот метод. Итоговое качество получилось на уровне коммерческих аналогов типа Topaz InFocus. Вот пример обработки реального изображения с очень большим размытием:
Введение
Описывать базовую теорию деконволюции здесь я не буду, о ней очень подробно было написано в предыдущих статьях. Тем, кто не читал их или подзабыл, рекомендую для начала ознакомиться с ними, чтобы понять терминологию и классические подходы:
Часть 1. Теория;
Часть 2. Практика.
Прежде чем перейти к описанию Total Variation (далее TV prior), необходимо понять, какие же недостатки есть у алгоритмов типа классического Винеровского фильтра? Самые основные — это эффект типа звона (периодический ореол на краях объектов) даже при небольшом уровне шума, размывание границ и мелких деталей, а также плохое шумоподавление с точки зрения человеческого восприятия. Все это сильно мешает практическому применению фильтра Винера ограничивая его применение задачами технического восстановления изображений, например для прочтения интересующих надписей.
Поэтому в последнее время было разработано большое количество самых разных методов, цель которых состоит в улучшении визуального качества. Надо заметить, что количество деталей при этом, как правило не возрастает.
Описание TV prior
Основное качество Total Variation prior с точки зрения результата — сохранение резких краев и сглаживание артефактов деконволюции. Записывается следующим образом:

К сожалению, вычисление этого функционала нельзя сделать простым образом, поскольку здесь требуется применение весьма сложных техник оптимизации.
В качестве альтернативы можно использовать сглаженный функционал вместо абсолютного значения:
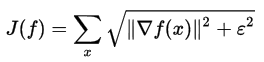
Когда эпсилон стремится к нулю, результат стремится к первоначальному определению Total Variation, но процесс оптимизации становится более сложным. И наоборот, при достаточном большом эпсилон результат оптимизации будет напоминать фильтр Винера с размытием краев. К сожалению, приведенная выше формула имеет неквадратичный вид, поэтому она не может быть просто вычислена в частотном пространстве Фурье, как это получалось с фильтрами Винера и Тихонова. Поэтому необходим один из методов пошаговой оптимизации для нахождения приближенного решения — например классический метод градиентного спуска:

Где тау вычисляется по следующей формуле:
А градиент сглаженного функционала определяется как:
Количество итераций должно быть достаточно большим — несколько сотен.
Это самый базовый подход в реализации TV prior, что называется «в лоб». Тем не менее, даже он дает очень неплохие результаты. На базе его в научных публикациях появилось много исследований, которые пытаются еще улучшить качество, а также уменьшить время расчета.
Практическая реализация
Описанные формулы, в принципе, несложные, хотя и очень громоздкие в реализации. Основная проблема — достичь высокого быстродействия, т.к. количество итераций очень большое и каждая итерация содержит много сложных действий. А именно — несколько сверток изображения целиком, вычисления полного градиента и дивергенции.
Скажу сразу, добиться хорошей скорости работы мне пока не удалось, на изображении размером несколько мегапикселей время финального вычисления составляет 2-3 минуты. Но Preview работает быстро — порядка 0.2 секунды.
Сборку под Windows можно скачать по адресу:
github.com/downloads/Y-Vladimir/SmartDeblur/SmartDeblur-1.27-win.zipИсходники (под лицензией GPL v3) доступны по ссылке:
github.com/Y-Vladimir/SmartDeblurОсновные изменения по сравнению с прошлой версией, которая была описана во второй части:
- Добавлены два метода деконволюции: TV prior и фильтрация по Тихонову
- Добавлена поддержка восстановления Гауссового размытия
- Улучшена скорость работы (примерно в 2.5 раза)
- Уменьшено потребление памяти (примерно в 1.5 раза)
- Максимальный размер обрабатываемого изображения по умолчанию 3000 (но можно менять в настройках)
- Добавлена секция настроек
- Добавлен Updates Checker
- Поддержка Drag&Drop
- Добавлен Help Screen с примером изображения и советами по настройке
- Исправлен баг с рябью в режиме preview
Язык C++ с использованием Qt.
Сравнение
Ну и теперь самое главное — на какое же качество можно рассчитывать при обработке размытых изображений. Будем сравнивать с топовым коммерческим аналогом Topaz InFocus. Остальные аналоги (типа FocusMagic) уже давно не поддерживаются или дают уж совсем неприемлемые результаты обработки. Итак поехали.
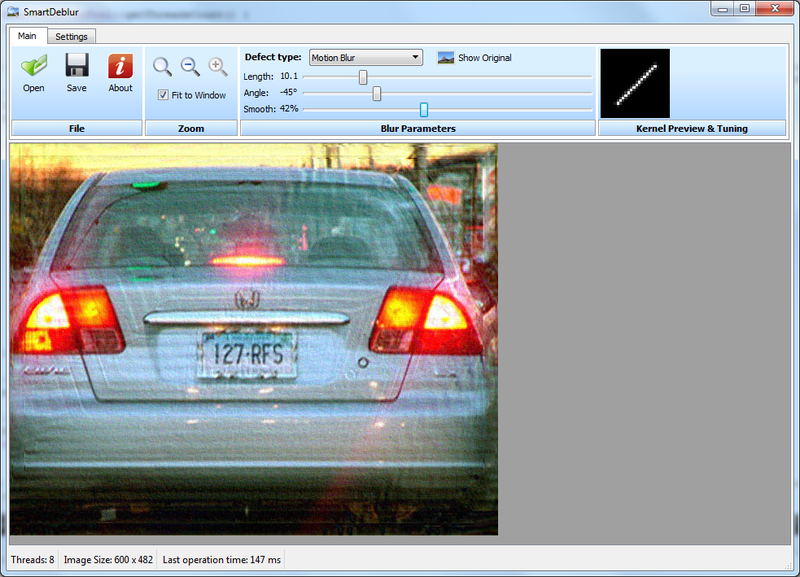
Сначала возьмем рекламный пример с сайта Topaz InFocus:
www.topazlabs.com/infocus/_images/licenseplate_compare.jpgВот результат от Topaz InFocus:
А вот результат работы SmartDeblur при следующих параметрах:
Type: Motion Blur, Length: 10.1, Angle: -45, Smooth: 60%

Как видим, результаты очень схожие. И не так очевидно, что лучше. Topaz InFocus, судя по всему, тоже использует алгоритм, похожий на TV prior плюс пост-обработка в виде шарпинга краев. Надо заметить, что приведенное исходное смазанное изображение, с очень большой вероятностью, является синтетическим. Т.е. взято неискаженное изображение и применен фильтр Motion Blur. Это видно по практически идеальному восстановлению, а также по подозрительно целым параметрам искажения — угол 45 градусов и длина 10 пикселей.
Теперь возьмем реальное изображение, которое я вчера сфоткал
на свой Canon 500D с ручным уводом фокуса:

Результат от Topaz InFocus при следующих параметрах:
Type: Out-of-Focus, Radius: 5.5, Suppress Artifacts: 0.34

Результат SmartDeblur при следующих параметрах:
Type: Out of Focus, Radius: 5.9, Smooth: 60%

Тут ничья, можно сказать. Параметры в каждой программе подбирались так, чтобы обеспечить наилучшее качество.
Еще один реальный пример снятый мною:

Результат SmartDeblur при следующих параметрах:
Type: Motion Blur, Length: 6.6, Angle: -37, Smooth: 53%

Выводы
Подошла к концу третья заключительная статья. Получилась она не особо большой, но, надеюсь, будет полезной. Как видим полученное качество обработки уже вполне приемлемо для реального применения. Основная проблема, которая остается — в местах, где есть светлые объекты, после обработки получается заметный эффект звона. Думаю, это связано с тем, что на светлых участках нарушается линейность отображения яркости пикселей, что дает неверную интерпретацию о его реальной яркости. Возможно, нужна логарифмическая предобработка яркости, либо еще что-то.
Еще раз напомню:
Сборку под Windows можно скачать по адресу:
github.com/downloads/Y-Vladimir/SmartDeblur/SmartDeblur-1.27-win.zipИсходники (под лицензией GPL v3) доступны по ссылке:
github.com/Y-Vladimir/SmartDeblurИ как обычно — буду очень рад замечаниям и предложениям по SmartDeblur!
Кто будет пробовать программу — учтите, что параметр качества Smooth в режиме превью и в режиме High-Quality ведет себя весьма по-разному. Поэтому финальный результат ползунка сглаживания можно оценить только после завершения просчета High-Quality.
P.S. Огромная просьба ко всем, кто мне пишет на почту. После публикации двух предыдущих статьей мне пришло (и продолжает приходить) большое количество писем с просьбой восстановить номера машин на кадрах с камер видеонаблюдения, когда весь номер занимает площадь несколько пикселей.
Я этим не занимаюсь! SmartDeblur этого тоже делать не умеет. Это задача совсем другого рода, а именно Super-Resolution, когда из нескольких изображений малого разрешения получается изображение высокого разрешения с новыми деталями, которых не было на исходных данных. Может быть когда-нибудь ей и займусь, но точно не в ближайшее время.
Blind Deconvolution — автоматическое восстановление смазанных изображений
Смазанные изображения — один из самых неприятных дефектов в фотографии, наравне с расфокусированными изображениями. Ранее я писал про алгоритмы деконволюции для восстановления смазанных и расфокусированных изображений. Эти, относительно простые, подходы позволяют восстановить исходное изображение, если известна точная траектория смаза (или форма пятна размытия).
В большинстве случаев траектория смаза предполагается прямой линией, параметры которой должен задавать сам пользователь — для этого требуется достаточно кропотливая работа по подбору ядра, кроме того, в реальных фотографиях траектория смаза далека от линии и представляет собой замысловатую кривую переменной плотности/яркости, форму которой крайне сложно подобрать вручную.

В последние несколько лет интенсивно развивается новое направлении в теории восстановления изображений — слепая обратная свертка (Blind Deconvolution). Появилось достаточно много работ по этой теме, и начинается активное коммерческое использование результатов.
Многие из вас помнят конференцию Adobe MAX 2011, на которой они как раз показали работу одного из алгоритмов Blind Deconvolution:
Исправление смазанных фотографий в новой версии PhotoshopВ этой статье я хочу подробнее рассказать — как же работает эта удивительная технология, а также показать практическую реализацию SmartDeblur, который теперь тоже имеет в своем распоряжении этот алгоритм.
Внимание, под катом много картинок!
Начало
Этот пост является продолжением серии моих постов «Восстановление расфокусированных и смазанных изображений»:
Часть 1. Теория — Восстановление расфокусированных и смазанных изображений Часть 2. Практика — Восстановление расфокусированных и смазанных изображенийЧасть 3. Повышаем качество — Восстановление расфокусированных и смазанных изображений Рекомендуется прочитать хотя бы первую теоретическую часть, чтобы лучше понимать, что такое свертка, деконволюция, преобразование Фурье и прочие термины. Хоть я и обещал, что третья часть будет последней, но не смог удержаться и не рассказать про последние веяния в области восстановления изображений.
Я буду рассматривать Blind Decovolution на примере работы американского профессора Rob Fergus «Removing Camera Shake from a Single Photograph». Оригинал статьи можно найти на его страничке:
http://cs.nyu.edu/~fergus/pmwiki/pmwiki.phpЭто не самая новая работа, в последнее время появилось много других публикаций, которые демонстрируют лучшие результаты — но там используется совсем сложная математика ((для неподготовленного читателя) в ряде этапов, а основной принцип остается тем же. К тому же, работа Фергуса является своего рода «классикой», он одним из первых предложил принципиально новый подход, который позволил автоматически определять ядро смаза даже для очень сложных случаев.
Модель искажения
И так, приступим.
Возьмем фотоаппарат и сделаем смазанный снимок — благо для этого не требуется особенных усилий :)

Введем следующие обозначения:
B — наблюдаемое смазанное изображение
K — ядро размытия (траектория смаза), kernel
L — исходное неразмытое изображение (скрытое)
N — аддитивный шум
Тогда процесс смаза/искажения можно описать в виде следующего выражения
B = K*L+NГде символ "*" это операция свертки, не путать с обычным умножением!
Что такое свертка, можно прочитать в
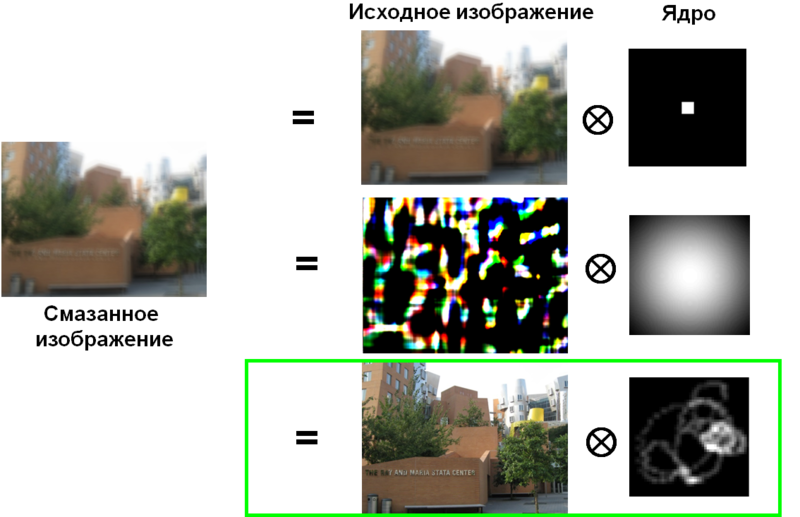
первой частиВ наглядном виде это можно представить следующим образом (опустив для простоты шумовую составляющую):

Так что же является наиболее сложным?
Представим себе простую аналогию — число 11 состоит из двух множителей. Каковы они?
Вариантов решения бесконечно:
11 = 1 x 11
11 = 2 x 5.5
11 = 3 x 3.667
и т.д.
Или, переходя к наглядному представлению:
Целевая функция
Чтобы получить конкретное решение нужно вводить ограничения, как-то описывать модель того, к чему мы стремимся.
Т.е. нужно больше информации. Одним из вариантов этого является задание целевой функции — это такая функция, значение которое тем выше (в простом случае), чем ближе получаемый результат к желаемому.
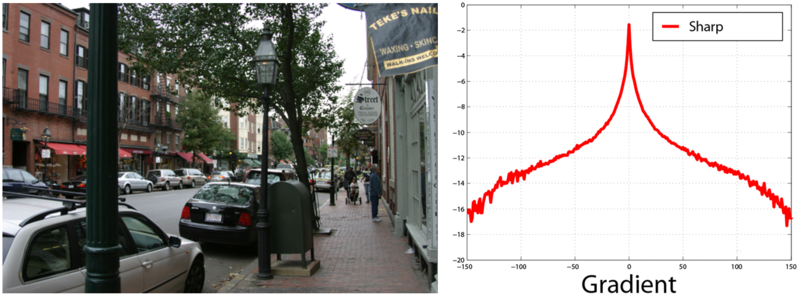
Исследования показали, что несмотря на то, что реальные изображения имеют большой разброс значений отдельных пикселей, градиенты этих значений имеют вид распределения с медленно убывающими границами (
Heavy-tailed distribution). Такое распределение имеет пик в окрестности нуля и, в отличие от гауссового распределения, имеет значительно большие вероятности больших значений (вот такое масло масляное).
Это совпадает с интуитивным представлением, что на реальных изображениях в большинстве случаев присутствуют большие области более-менее постоянной яркости, которые заканчиваются объектами с резкими и средними перепадами яркости.
Вот пример гистограммы градиентов для резкого изображения:
И для размытого изображения:
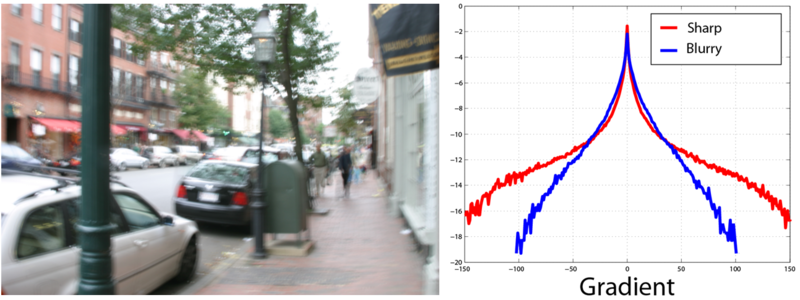
Таким образом мы получили инструмент, которые позволяет нам измерить «качество» получаемого результата с точки зрения четкости и похожести на реальное изображение.
Теперь мы можем сформулировать основные пункты для построение завершенной модели:
1. Ограничения накладываемые моделью искажения
B = K*L+N2. Целевая функция для результата реконструкции — насколько похожа гистограмма градиентов на теоретическое распределение с медленно убывающими границами. Обозначим ее как
p(LP)3. Целевая функция для ядра искажения — положительные значения и низкая доля белых пикселей (т.к. траектория смаза обычно представлена тонкой линией). Обозначим ее как
p(K)Объединим все это в общую целевую функцию следующим образом:

Где
q(LP),
q(K) распределения, получаемые подходом
Variational Bayesian Далее эта целевая функция минимизируется методом покоординатного спуска с некоторыми дополнениями, которые я не буду описывать из-за их сложности и обилия формул — все это можно прочитать в работе Фергуса.
Этот подход позволяет улучшить качество имеющегося ядра, но им нельзя построить это ядро с нуля, т.к. скорее всего в процессе нахождения решения мы попадем в один из локальных минимумов.
Пирамидальный подход
Решением этой проблемы является итерационный подход к построению ядра искажения.
Вначале из входного размытого изображения мы строим пирамиду изображений с разным разрешением. От самого маленького размера до исходного размера.
Далее мы инициализируем алгоритм с помощью ядра размером 3*3 с одним из простых шаблонов — вертикальная линия, горизонтальная линия или гауссово пятно. В качестве универсального варианта можно выбрать последний — гауссово пятно.
Используя алгоритм оптимизации, описанный выше мы улучшаем оценку ядра, используя самый маленький размер изображения в построенной пирамиде.
После этого мы ресайзим полученное уточненное ядро до, скажем, 5*5 пикселей и повторяем процесс уже с изображением следующего размера.
Таким образом на каждом шаге мы чуть-чуть улучшаем ядро и в результате получаем весьма точную траекторию смаза.
Продемонстрируем итеративное построение ядра на примере.
Исходное изображение:

Процесс уточнения ядра:
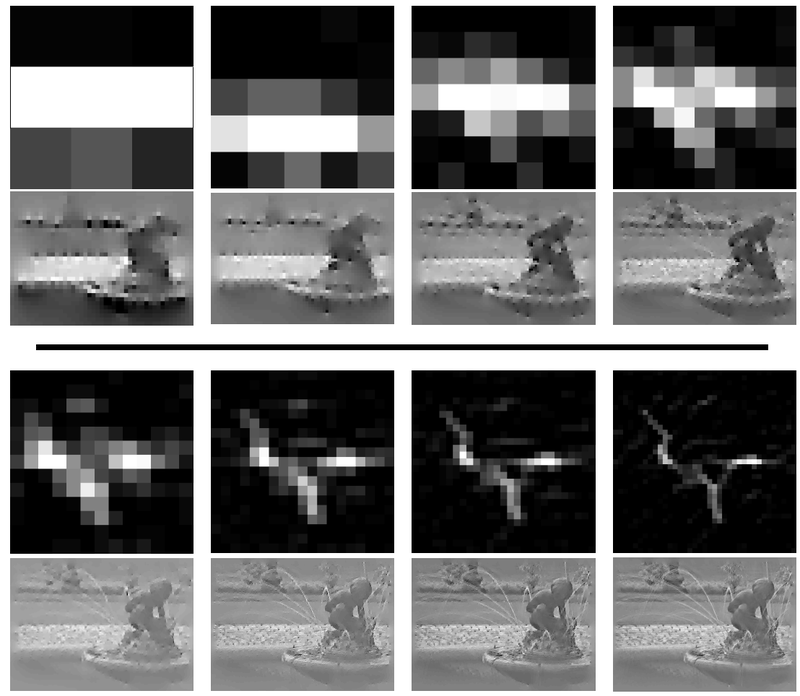
Первая и третья строки показывают оценку ядра на каждом уровне пирамиды изображений.
Вторая и четвертая строки — оценка неискаженного изображения.
Результат:

Блок-схема алгоритма
Осталось собрать все вместе и описать алгоритм целиком:
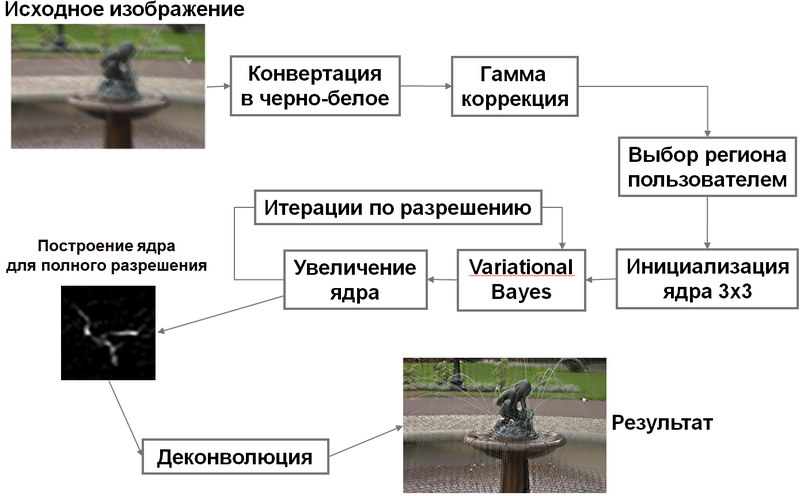
Более современные подходы имеют примерно такую идею последовательного уточнения ядра, но используют более изощренные варианты целевой функции для результата реконструкции и ядра искажения. Плюс к этому осуществляют промежуточную и финальную фильтрацию получаемого ядра, чтобы убрать лишний шум и исправить некоторые ошибки в алгоритме уточнения.
Практическая реализация
Наверное, самое интересное — это поиграться с алгоритмом Blind Deconvolution вживую на реальных изображениях!
Мы реализовали похожий вариант и добавили как новую функцию в SmartDeblur 2.0 — все по-прежнему бесплатно :)
Адрес проекта:
smartdeblur.net/(Исходники и бинарники от
предыдущей версии можно найти на GitHub:
github.com/Y-Vladimir/SmartDeblur )
Пример работы:
Другой пример:
И в заключение, результат работы на изображении c конференции Adobe MAX 2011:
Как видно, результат практически идеален — почти как у Adobe в их демонстрации.
Технические детали
Пока что максимальный размер обрабатываемого изображение установлен как 1200*1200. Это связано с тем, что алгоритмы потребляют очень много памяти. Даже на изображении 1000 пикселей — больше гигабайта. Поэтому введено ограничение на размер.
Позже увеличим его, после того как оптимизируем деконволюцию и пирамидальное построение.
Интерфейс выглядит следующим образом:
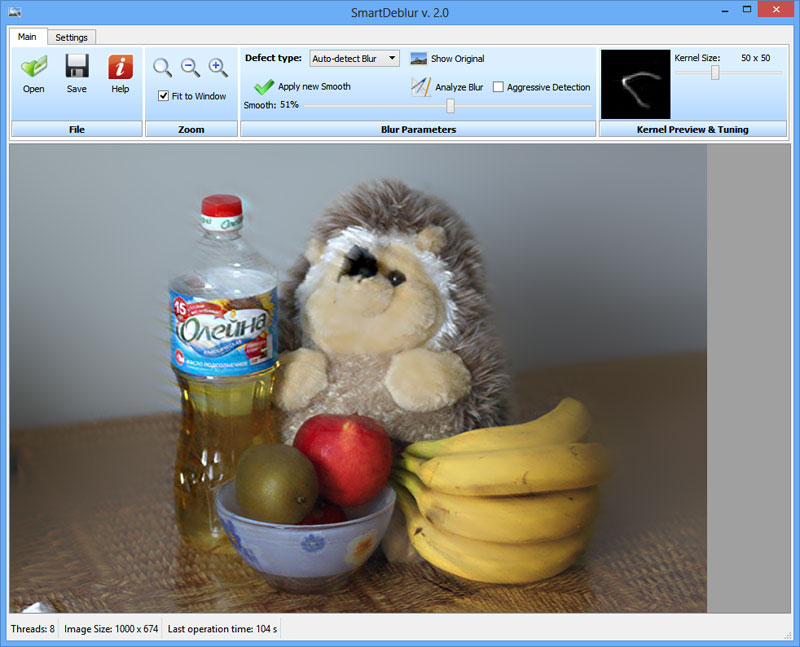
Для работы с программой требуется лишь загрузить изображение и нажать «Analyze Blur» и согласиться с выбором всего изображения — анализ может занят несколько минут. Если результат не устраивает, можно выбрать другой регион (выделить мышкой на изображении двигая ее вправо-вниз, немного не очевидно, но пока так :) ). Правой кнопкой выделение убирается.
Галочка «Agressive Detection» изменяет параметры, чтобы выделять только самые важные элементы ядра.
Пока что хорошие результаты достигаются далеко не на всех изображениях — поэтому будем очень рады фидбеку, это поможет нам улучшить алгоритмы!
Vladimir Yuzhikov (Владимир Южиков)
Источник:
http://habrahabr.ru/post/136853/
http://habrahabr.ru/post/147828/
http://habrahabr.ru/post/152885/